Jeff THe Land Shark MK1-5 Build Blog
- Dec 13, 2025
- 8 min read
Updated: May 31

Since this is a bit more stretched out than other projects, I've chosen to do this as a live document instead of a post project summary.
Since joining the UMD Leatherbacks combat robotics team in Freshman year, combat has become one of my favorite hobbies. Jeff (the land shark) is my first combat robot, weighing in at 1lbs. While most builders use a "kinetic weapon" (typically a spinning blade or disc), I didn't just want to destroy another bot, I wanted more of a design challenge. Something that would test my abilities, and take less damage to minimize costs. Because of this, I favored the control bot approach.
As an avid Battlebots and NHRL fan for years, I know several archetypes of bots. While kinetic weapons are typically split between drum spinners, midcutting horizontals, undercutting horizontals, tower verts, wide verts, and full body spinners; control bots tend to be more varied. One of my favorite BattleBots is Claw Viper, a grappler style robot designed to grab an opponent then suplex them over itself. It's drive speed, heavy armor, and powerful lifter takes full control over almost every fight, no matter the opponent.
A grappler is a tricky mechanism in general, having 2 motions operating in sequence from a single motor. It does this through staged gears and a clever linkage.

The lower gear is directly power by the motor, which then powers the larger upper gear (which is also constrained to the base. The yellow lifter pivot on the same axis as the larger upper gear, and has a clamping arm mounted on to it and driven by a smaller gear.
The clamping arm starts the motion until it cannot rotate further (it's clamped on to another robot or the floor), fixing the upper gears together and creating a torque on the lifter (since the larger gear is still moving relative to the lower gear). Creating a very interesting staged motion sequence.

Like any "complicated" system, it's best to take the design in phases, iterating and improving in each step. mk1 would help me work through what this robot would look like, the scale, and the general layout. mk2, I would start thinking about more of the specifics and get feedback from some of the more experienced Leatherbacks members. Then mk3, I would create a well-designed product that could actually compete without getting blown up.


mk1 and 2 I used a lot of the same design technique I had learned in FRC and other projects. Modularity, simplicity, and consistency were the keys to the design. I also took the opportunity to work on my optimization skills, using FEA to "pocket" the grabber arm for minimum weight.
While mk2 would theoretically work, there were some key fallacies to the design. It was cutting it very close on weight budget, leaving little room for armor, which is a must as a control bot. The electronics were difficult to access as the top plate was under the lifter, requiring partial disassembly to remove for even simple battery changes. Additionally, the design was simply not polished and had several macro errors in the design process.

With all that in mind, I design mk3. A much slimmer and compact layout, a belly mounted cover for better accessibility, and plenty of weight for armor configurations. Additionally, I used custom wheel treads and hubs (inspired by Liam King) which I molded with polyurethane for maximum grip. Modularity was again a requirement, hence the lifter can now be detached as one subassembly via slots in the top of the mount and screws on each side.
As for materials, I used 2 of the staples of plastic combat robots. TPU, a very impact resistant and flexible filament that can take nearly endless hits, and Super PLA, a rigid yet still durable filament for cases where flexibility isn't an option.
After soldering my electronics and assebmling mk3, I tested that night. While the grappler worked, it lacked the power to lift anything besides itself. So I went back to check the torque specs on the motor, turns out it was listed to include the gear reduction (:skull:). With a very short turn around before SCR@M, so not enough time to buy a better motor, I improvised. Designing a custom 11:1 cyclodial gearbox to fit in a just 24mm diameter (making it smaller than any 3D printed gearbox I have found on the open web). Since 3D printed pins snapped, I used clips of steel paper clips and supported them at both ends.

After several iterations and working through tolerances, and a slight body redesign, I reassembled the bot.
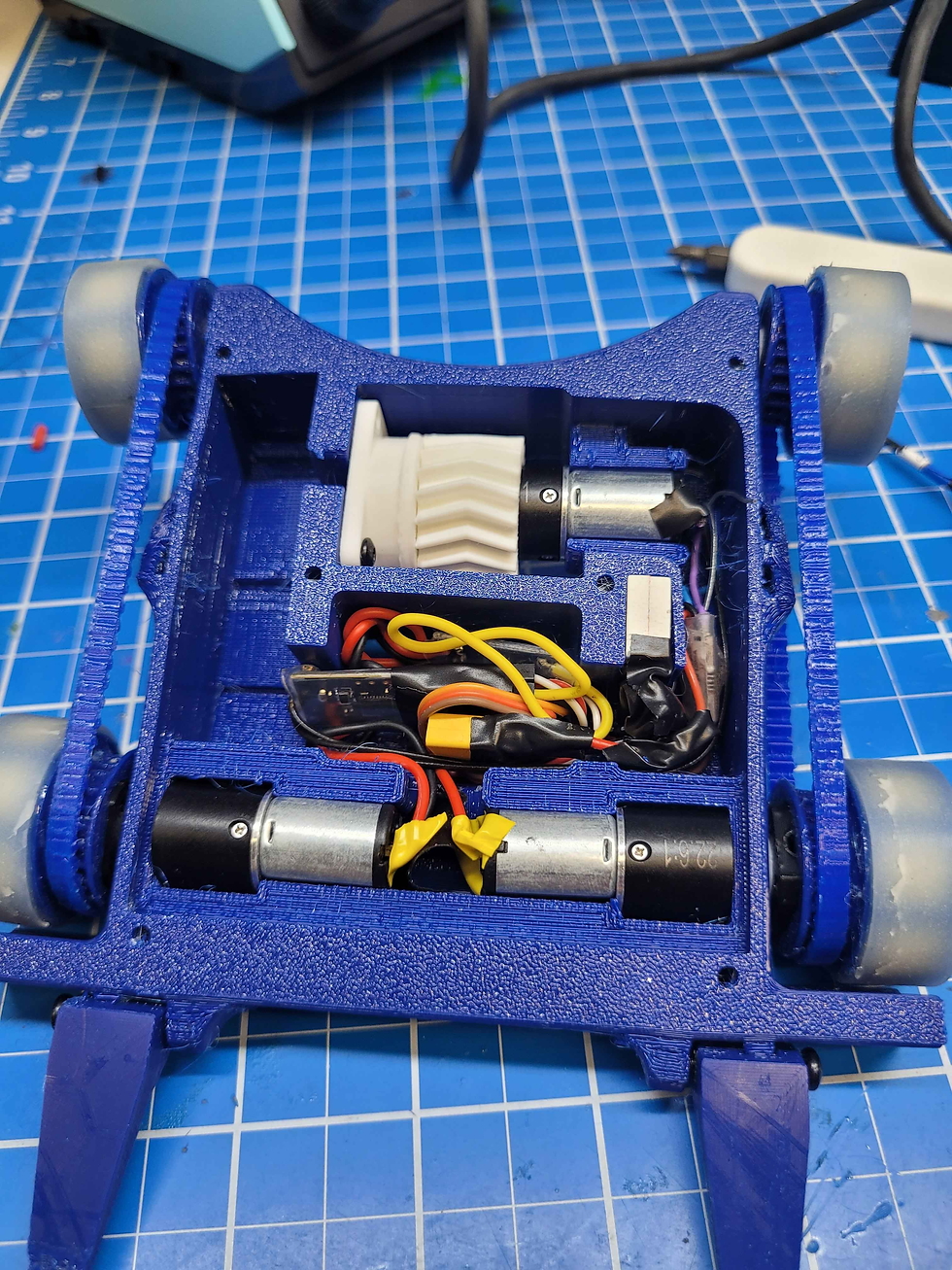
I'll take this opportunity to explain the electronics of an antweight grappler. We use lipo battery fed through an XT-30, with a switch to open/close the circuit. This then powers the Double ESC (for the brushed drive motors) and a Single ESC (for the brushed lifter motor). There is an integrated BEC in the DESC that power the receiver, which then controls the ESCs.
And with all that, it was ready to test again.

I tested it the night before SCR@M, and it worked flawlessly, I was confident going in the next morning. But unfortunately, an unknown issue with the single ESC prevented the grappler from working. Luckily, I was still able to place 5th at SCR@M thanks to the incredible durability of my chassis. I was then beaten in first round of playoffs by Liam King's drum spinner, Akuuu.
This whole process gave me a lot of experience and a lot to think about. I soon started working on mk4, a much more improved version using a Repeat Robotics mk4 high reduction brushless motor that removes the need for the cycloidal and gives me much more power. While I have assembled the majority of mk4, supply issues have meant the motor still hasn't shipped in. So I'll be going into winter break without it fully functional.

Nevertheless, over break I will be working on a 3lbs grappler (with a very unique layout) that I hope to compete at NHRL.
Update 5/24/26
Welp, another semester past and Jeff had a lot of changes. Mk4 went quite well and I had the chance to compete with it at MACRO's Heartless Horizontals. I was sadly plauged the first 2 matches by electronics issues, but managed to go 2-2 despite those.

I identified a few issues:
The chassis' flexibility made the belts very loose, causing the rear wheel to not be driven under load
The flexibility in the arm mounting allowed the gears to slip when the arm was under torque, a problem that worsened throughout the competition
The narrow profile of the body made control very difficult (robots just drive around my forks
Very tight spacing for wiring and other internal design choice made electrical difficult to repair
Because of these issues, I created an mk5. This would be the best iteration yet and a very large change from the previous models. Featuring a wide body, a reinforced motor and arm mounting, controlling outriggers, forks that extend further than the lifter to defend it, and a much better construction overall.

It became very clear to me how much better of a design overall, and with several months before the spring SCR@M competition, I optimized the design to a fantastic place. First of all I split the body in 2 and used "rigid plates" across them. This made the bot much easier to print, assemble, and repair.
SCR@M this semester was extremly fun. Nearly all of the freshman/rookie member robots worked consistently, allowing us to do an expaned competition. We ran a new point system for the qualifying rounds. Veteran robots (Akuu, Ultraviolet, Pachyderm, Redemption, Starscream, and Outpost 31) were deemed bosses. Beating a non-boss gave you 2pts, loosing to one lost you 1pt. Beating a boss gave you 3pts, but there was no penalty to loosing to one. Additionally, since this took place during UMD's Maryland Day, we have lots of spectators throughout the day.

My first match was against a full-body wedge called O-Beast. This thing was probably the most terrifying bot to look at from the sheer number of forks on this thing. It's width make it almost impossible to not get scooped up. After O-Beast got a few pins on me, it lost a wheel, leading me to supplex it (or at least half of it) before it got counted out.

Next up was Outpost-31, a very experienced lifterbot that recently won second place at RABID's April Annihilation. This bot has been deemed the best control bot in the area so I knew this fight would be interesting. Our exchanges go back and forth; he wins a pin then I supplex and so on. I start to have drive issues on one side, which started inhibiting my ability to pin. Altough it was a very close fight, Outpost was declared the winner.

My next fight was against Rusty Bones, a beater bar/drum spinner. This was a very compact robot that I should in theory matchup well against. After getting a few pins and supplexes, I sadly lost one side of my drive. With that loss in damage, Rusty Bones won the match.

My next match I faced Kugelblitz, a huge vertical spinner with a huge MOI. This thing was shattering dummy chassis' the night before so I was mildly terrified to fight it. With a weapon this large, it was quite difficult to even grab the thing. When I was able to grab a side or the back though, it created some very chaotic supplexes that won very some cheers from the crowd. I incurred a decent bit of aesthetic damage, but ultimately won the match.

My last qualifying match I faced Reaver, a compact undercutting horizontal spinner. This was another favorable matchup for me geometry-wise. This advantage easily allowed me to flip them over and occasionally get them stuck on their back. After resetting them a few times for the sake of the fight not ending after 30 seconds, I came out with the win.

After qualifiers I ended up tied for 4th seed with the boss Outpost 31. This was a significant improvement over the last event and I'm very happy with how I performed in quals. This seeding would be unfortunate, though, as I ended up getting matched against Burt Macklin, a wide vertical spinner with some very long forks. Driven by the same guy as Outpost 31, this thing was severly under ranked due to electrical issues. We had some interesting first few engagements before I got stuck on arena debris, allowing him to get a huge momentum shift and get several hits off. We then go back and forth the rest of the fight, me getting some good suplexes off that sent him tumbling across the arena due to his 2wd setup. But alas it wasn't enough, and he won the match.

With that loss I was out of the tournament, and Burt Macklin went on to place 2nd. Nevertheless, this was a fantastic event and taught me a few lessons.
Grapplers and very difficult to fight verts with
Not being able to do nearly any damage hurts a lot in judging and the fight overall
Lifter forks need to have TPU "socks" on the tips to prevent splintering
Being unkillable is really nice and made pit repairs minimal
So with that, I have decided to pivot this design quite a lot. After looking through other bots, especially at NHRL, I decided to switch to a Lifter Vert archetype. Using a vert to deal damage but with a standard underlifter for control. This would be heavily inspired by Lars Elliot's Ignis and Pyre.
Because of this, this post must come to an end for the sake of organization. It's been a great year and I learned a lot in good tactics and design strategies to be used in both future bots and in other engineering projects.