Lord of the Rings (FRC 2024)
- Sep 4, 2025
- 4 min read

Highlights:
Pivoting Arm with 2 stage elevator (Version 1)
Unified Ground Intake and Shooter
Modularity allowed improved iterations throughout the year
Team won the FIRST Impact Award, the highest honor in FRC
2024 was a year of transition for the team. We lost several experienced senior leads and gained just as many new rookies. Between the young roster and our previous success, we spent 2024 strengthening our design process, team procedures, and training.
The game (Crescendo) was focused on scoring foam rings (Notes) into the Upper (Speaker) and Lower (Amplifier) goals. Scoring 2 notes in the Amp would trigger a 10 second Amplification Period where Speaker scoring would count for 250%. This Amplification Period made Crescendo one of the most strategically complicated games in FRC history.

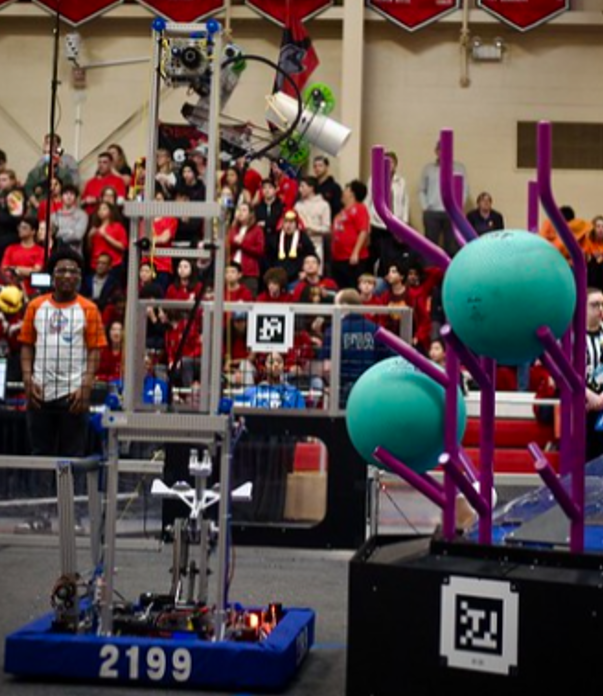
Our robot "Lord of the Rings" took on many forms due to its modularity that allowed us to iterate on the design throughout the year. Version 1 featured a pivoting 2-stage elevator that would angle the shooter depending on the distance from the "Speaker". The elevator would extend the arm for intaking and eventually climbing at the end of the match. It was based on a 24x24 chassis to be as nimble as possible against defensive robots.

Throughout LotR 1's season, we iterated the intake and shooter several times.
1.1 featured a belt system to keep consistent contact with the note throughout the intake process. These belts were prone to slipping along the PVC pipes, hence 1.2 used beveled rollers to allow for passive centering of the belts. This worked fantastically in testing, but we failed to account for load along the shaft caused by the note dragging as we turned. This was simply too much force for the belts to center, so they had to be abandoned for simple wheels in 1.3. We also added mecanum wheel to help center the note relative to the intake.
1.1 and 1.2 featured a side wheel shooter design with 2 wheels. This worked well, but didn't have nearly enough power even with the boost from the new intake. This power limited us to shooting only from directly in front of the speaker, instead of at a distance. For 1.3 we swapped to a design we saw several other teams using, two shafts on the top and bottom of the note. This had a lot of power (enough to break our speaker a few times), but the lack of spin meant lack of control in some cases. So we opted for different durometers of wheels (meaning slightly different grips) so that the note would consistently spin. This had a side effect of curving the shot to the right, but it was consistent, so we simply offset the yaw shot angle and it worked amazingly.
2024 was a trial in patience, ingenuity, and many new processes.
The biggest change was our revamped design process. In 2024, we greatly favored CADing the entire robot before building it. This meant we could iterate much faster and (theoretically) fewer mistakes would be made in manufacturing. Sadly, tilted the scale a bit too far. Our reliance on theoretical concepts and not physical prototypes meant every design was tested first on the robot and in competition. This took a lot of time and energy, leading to a rushed product. We kept records of this, and they would be fixed through the offseason and into the 2025 season.
On the other hand, one of our best changes was better usage of our CNC mill and 3D printer. This meant we could have more complicated geometries and more precise parts. We also carried this into the offseason and 2025.

Overall, LotR 1 could be counted as a partial success. It worked, inefficiently and inconsistently, but it worked. We placed 18th at Ashland, 6th at Severn, and 35th at District Championships. Not bad, but not where we wanted to be. The true success of this season was winning the FIRST Impact award, the highest honor in FRC. This was awarded for our numerous outreach efforts that strive to bring robotics to all. Additionally, I was a FIRST Dean's List nominee, a very prestigious award for those that dedicate themselves to FIRST's values and spreading STEM to the community at large.

Going into the offseason, we learned a lot from the season for how to play the game, our design process, and how we conduct the team as a whole. I'll get into the team wide changes in the 2025 blog, but the robot underwent many changes to the overall design. We wanted to minimize costs as this would only be used as an offseason and outreach robot, so we decided to build off of LotR 1.3.
We started by researching what working well in the season, both for our team and others. The primary of which is the "under-the-bumper" intake instead of an "over-the-bumper" one. A UTB allows robots to intake without the risk of being run into by another robot (which could damage the intake). This means less work in the pits and the ability to contest notes on the field.
Another thing we noticed in the season was that our very heavy intake put too much torque on the arm for precise targeting of the shooter. For this reason, we added a transfer path from the intake to the arm.

We also tested new parts for our robots in general. My personal favorite of which being Vex's Versa Rollers. These are basically just a Lexan pipe with polyurethane coating. These made it much easier to assembly intakes as you'd have a single roller instead of several wheels. Additionally, we used more CNC plates and 3D printed parts than ever before. These were vital in ensuring the physical assembly would be as we designed it.

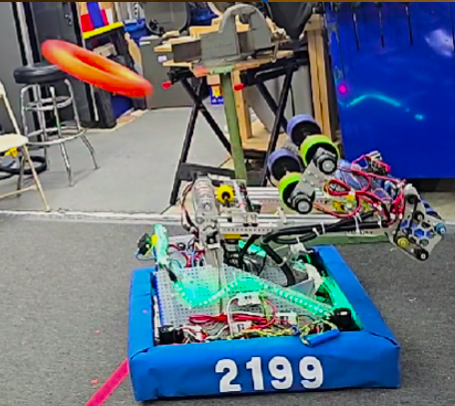
2.0 performed much better than its predecessor, and cause much less panic in the pits. We continue to use this robot at outreach events, passing the notes to interested kids.
Overall, this season was the least impressive of my 3 in FRC, but ironically was the one I learned the most in. Everything from design flow to proper CNC techniques, I was more than prepared for the 2025 season, and other projects that I'd be doing later that year.
Thanks for reading,
Austin