Shark Bait (FRC 2025)
- Sep 5, 2025
- 6 min read
Updated: Sep 5, 2025
Highlights:
54 in stroke, 3-stage cascading elevator
One of a kind climber that uses 2 95lbs magnets
Could accomplish any task in the game
Undefeated in qualifying matches and ranked 1st at Alexandria
Team won FIRST Impact Award for second year in a row
2025 was the most important, and my favorite, year of my life. I was graduating from Liberty, getting college acceptances, working on more projects than ever, and still having fun through it all.
I was promoted to mechanical captain and drive coach, while keeping my role as design lead. In other words, I was responsible for teaching the rookies, passing on the knowledge I had gained over the years, running administrative things, leading the whole development process, and (most importantly) making sure no one did anything stupid that would incur injury.
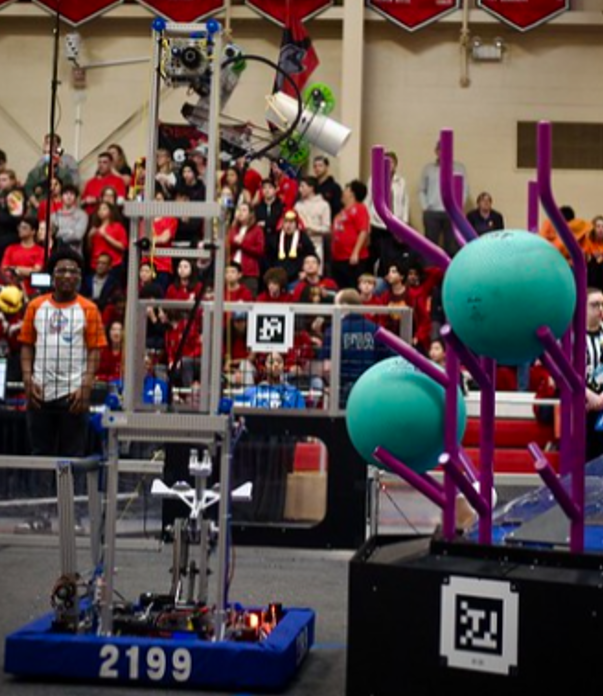
The game (Reefscape) removed around removing Algae (large playground balls) from the Reef and into the Net. This would make room for Coral (5" PVC pipes) to be put on the Reef. At the end of the match, you'd climb the Deep Cage (welded steel frame). This climb proved to be one of the most influential components of the game.

In 2025, we focused on designing a robot for the role we want to take in the game, rather than deciding our role based on our robot. This meant a more data and strategic method to conceptualizing our overall design. This largely influenced our decision to have 2 robots this year, one for prototyping (1.0-1.3) and one for competition (2.0-2.2). This meant more testing before committing to a single design, and more time for programmers and drive team to work on the bot.

This design process resulted in one of the most unique bots in the world. A dual 3 wheeled grabber that could hold either Coral or Algae. It could intake Coral from the Source, but it could intake Algae either directly from the Reef or transferred from the ground intake. This generalist style robot allowed us to be a dominating force on the field, or fit in with nearly any team composition, as many teams did not have Algae capability. I am very proud of this design, as every decision in the development was very well researched and thought through. We moved in phases of 5 proofs of concept, then 3 prototypes, and ultimately 1 final. Each of the designs was inspired by either the PoCs or bots from past years. In the case of the 3-wheeled design, it was inspired by some robots from 2023 that used a similar system for the Cones and Cubes. The design was chosen as it was highly variable in its design, would fit very well into our modular architecture, solved many small problems that arose with the removing and shooting of Algae, and (most importantly) it was something that no one else had done.

The grabber was mounted on a pivoting arm that was raised by a custom designed 3-stage cascade elevator. Cascade was chosen over continuous, as it would support the horizontal forces well throughout the range of motion. We used a similar cord to Dyneema (doesn't stretch) to raise and tension the elevator. This elevator was the source of much sweat and anxiety do to the out of date bearing blocks we had to use due to supply issues. Despite this, the robot proven to be one of the most consistent in team history.

Last, but certainly not least, our award-winning climber. Easily the most unique design in the district, if not the world. This was one of the toughest climbs I've seen in FRC. The awkward geometry and height of the Deep Cage was very strange to work with. We went through a similar process as the grabber, going through different concepts that we've seen from past years and other teams. But in each of them we noticed fatal flaws. Slipping from the geometrically ideal height on the cage, too low a tolerance to consistent drive into the right position, etc. etc. That's when we decided to make our own design. We noticed there's a "lip"on the under side of the top plate on the Cage. A prototype was designed, built, and successfully tested within 2 hours. But we had an issue of the Cage bouncing out off the reaction bar, so we came up with the idea of using magnets to both hold the cage in place and help pull the cage into position. Then the last major obstacle was staying climbed after robot power went out (climb points are scored 3 seconds after the end of the match). We designed a custom ratchet using a 1/4" aluminum plate and a hardened steel L-beam. This climber won us the Innovation in Control award, making it (to my knowledge) the only mechanical system (as opposed to a software based one) that won that award in the Chesapeake district if not beyond.

We did incredibly well in competitions. At Severn, we ranked 6th, were the 4th alliance captain, and got 3rd place. This was already an impressive showing, placing us 13th in the district based on first competition performance. Then the following week at Alexandria... well, the only way to describe it is mythical. We were undefeated through all qualifying matches, a feat only matched by 2 other teams in the district (both of which were alliance captains at Worlds). We pulled off an absolutely incredible ranking score of 5.08/6, 1.33 pts above the 2nd ranked team.
Naturally, we ranked 1st going into alliance selection. We had nearly every team pitching themselves, hoping we'd pick them. We ended up choosing, 9072 Tiger Bots (one of our close friends and one of the 2 teams in the district that went undefeated at their last comp), and 2421 RTR (for their climbing and defensive abilities). We won the first match with a whopping 143-43 victory. But sadly, in our next match, our alliance mate sadly incurred an accidental red card by getting stuck on the Reef. Even without them, we would have won the match 124-115. But alas, a red card is an automatic disqualification and elimination.

I guess it reminded us that all good things had to come to an end. This was still an amzing competition, especially since the team won the FIRST Impact award (the highest honor in FRC) for the second year in a row. We left the competition ranked 267th in the world and 7th in the district, the best our team has done since 2009.
We advanced to the District Championships yet again. But our luck had flipped again. We had the most difficult schedule out of all 54 teams, with a score of 0.84/1 (.05 higher than the 2nd most difficult). This, and some early breakages, left us in 26th. We were the second pick of alliance 4, and still had a very impressive run in the playoffs, placing 4th overall.
Sadly, between Alexandria playoffs and DCMP qualifiers, we missed out on Worlds by 5 places. Even then, 2025 was still an incredible season that I will never forget. Even though we didn't go to Houston, it was still the perfect end to my FIRST career. Those 8 years made me who I am and will always be a part of me. They taught me more than school ever would, they brought me to the first community I've ever truly belonged in, and they introduced me to the most amazing people I have ever met, I'm so glad to call most of them my friends.
It wasn't until after this season that I realized the true meaning of FIRST's motto:
"More than Robots". It's not about the robots we made, the names we called them, and definitely not about who wins or loses. FIRST is about learning the skills we will all need in the future, about encouraging people to get out there and help your community, it's about the fun and the energy that you won't find anywhere else, and, most importantly, it's about the people we met and the ones we became along the way. I would never be where I am without FIRST or all the people that made it special for me.
So with that in mind, I would like to thank every single person that helped me at some point during my journey through FIRST:
2199 members and mentors: Aarav, Abby, Adam, Aditi, Alex, Allwyn, Ananya, Andrew, Annabelle, Ben, Ben, Brant, Brendan, Brian, Cameron, Casey, Catherine, Charles, Charlie, Christian, Cory, Dexter, Dylan, Drew, Fred, Gwen, Hannah, Isha, Jack, Jake, Jalen, James, Janice, Jason, Joe, Joe, Joey, Josh, Kelly, Leroy, Logan, Lucas, Mary, Matt, Matthew, Meaghan, Maya, Michael, Michael, Noah, Patty, Paul, Peter, Robyn, Rose, Ryan, Scott, Sam, Sarah, Shishir, Sulle, Tim, Tom, Tyler, Tyler, Vanessa, Wyatt
Others (no particular order): Alex, Casey, Josh, Casey, Aidan, Greyson, Joey, Jen, Rafi, James, Robert, Simon, Emmet, Levi, Josh, Megan, Asha, Eric, Charlie, Kat, Ankit, Falon, Aryan, Judy, Mia, Ansley, Jack, Madison, Jared, Jonathan, Izzy, Ismael, Madhav, Pooshan, Liam, Jacob, Jacob, Jaiden, David, Jimmy, Brad, James, James, Alex, Atlee, Alex, Alex, Preston, Brandon, Miriam, Daniel, Ali, Dak, Matthew, Matthew, Matthew, Dom, Ian, Berthe, Yosi, Yoshi, Shorya, Shelly, Eliot, Liam, Ryan, Sanjiv, Shriya, Raghav, Joel
*special thanks to those in bold, I could not even imagine where I would be without you
(Sorry if I missed you, y'all know I'm awful with names)
Thanks for reading through this crazy journey,
Austin